Constrained Deep Learning Methods for Optimization of Autonomous Systems
By Brian Zhou
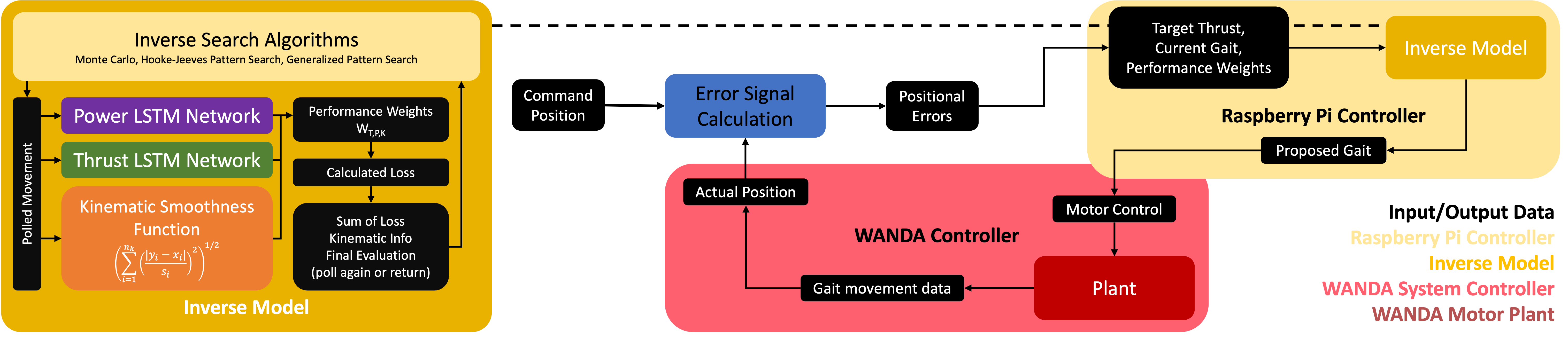
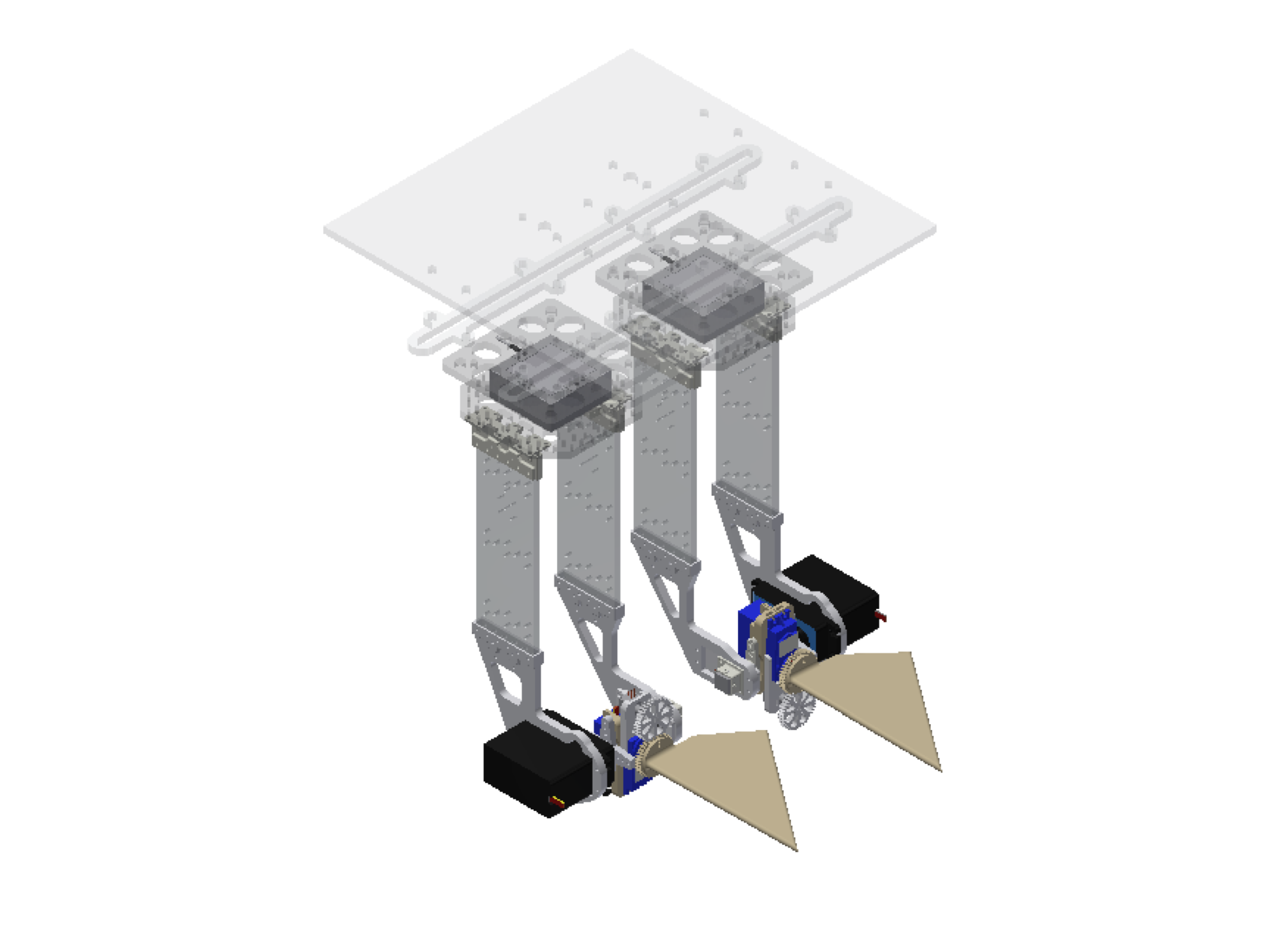
The last few decades have led to the rise of research focused on propulsion and control systems for bio-inspired unmanned underwater vehicles (UUVs), which provide more maneuverable alternatives to traditional UUVs in underwater missions. Recent work has explored the use of time-series neural network surrogate models to predict thrust and power from vehicle design and fin kinematics. We develop a search-based inverse model that leverages kinematics-to-thrust and kinematics-to-power neural network models for control system design. Our inverse model finds a set of fin kinematics with the multi-objective goal of reaching a target thrust under power constraints while creating a smooth kinematics transition between flapping cycles. We demonstrate how a control system integrating this inverse model can make online, cycle-to-cycle adjustments to prioritize different system objectives, with improvements in increasing thrust generation or reducing power consumption of any given movement upwards of 0.5 N and 3.0 W in a range of 2.2 N and 9.0 W. As propulsive efficiency is of utmost importance for flapping-fin UUVs in order to extend their range and endurance for essential operations but lacks prior research, we develop a non-dimensional figure of merit (FOM), derived from measures of propulsive efficiency, that is able to evaluate different fin designs and kinematics, and allow for comparison with other bio-inspired platforms. We use the developed FOM to analyze optimal gaits and compare the performance between different fin materials, providing a better understanding of how fin materials affect thrust generation and propulsive efficiency and allowing us to inform control systems and weight for efficiency on the developed inverse gait-selector model.
Files and Resources
Files are coming soon!
Photo Gallery